
Data-flow Oriented Software Framework for the Development of Haptic-enabled Physics Simulations
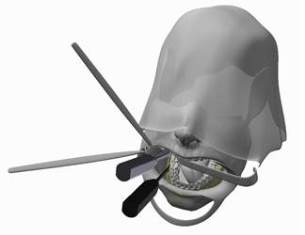
This paper presents a software framework that supports the development of haptic-enabled physics simulations. The framework provides tools aiming to facilitate a fast prototyping process by utilizing component and flow-oriented architectures, while maintaining the capability to create efficient code which fulfills the performance requirements induced by the target applications. We argue that such a framework should not only ease the creation of prototypes but also help to effectively and efficiently evaluate them. To this end, we provide analysis tools and the possibility to build problem oriented evaluation environments based on the described software concepts. As motivating use case, we present a project with the goal to develop a haptic-enabled medical training simulator for a maxillofacial procedure. With this example, we demonstrate how the described framework can be used to create a simulation architecture for a complex haptic simulation and how the tools assist in the prototyping process.
